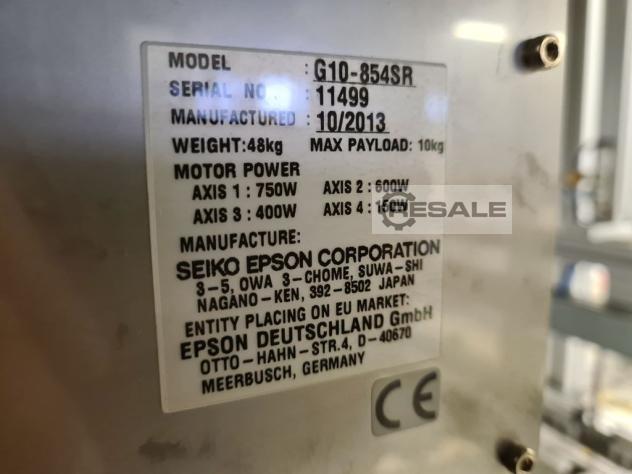
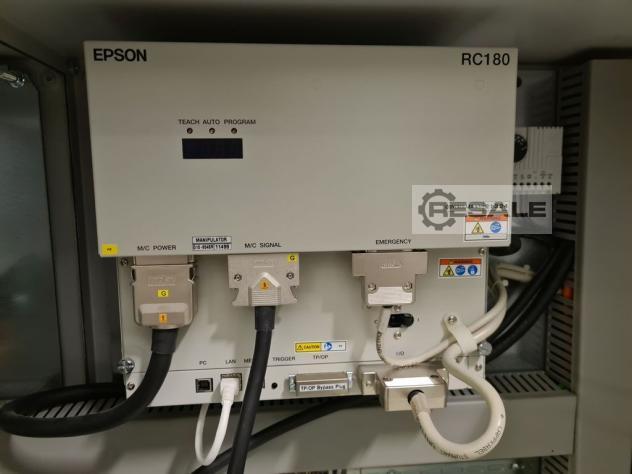
Epson G10-854SR Robot Screwdriving Station Dosing Station
Montagem de peças para rádios e sistemas de navegação para
automóveis e para os testar.
A estação de montagem é projetada como uma armação de alumínio
fechada com uma armação de soldadura de aço inserida e tem um
design muito compacto.
Os armários de comando e os terminais de válvulas estão integrados
no sistema.
Todos os processos de movimento durante o funcionamento do sistema
podem ser rastreados em todos os lados através de grandes janelas e
portas.
A operação é através de um ecrã táctil.
A estação de montagem está dividida em subestações 3.1 área de
dosagem, 3.2 área de montagem
KK+SW e 3.3 frente de área de montagem. (KK=sumidouro de calor,
SW=ângulo das anteparas)
As etapas de trabalho de acordo com estas áreas de montagem são
descritas abaixo:
St.3.1: Gama de dosagem
- uma WT com chassis anexado e placas de circuito impressos entra na
área de dosagem através do cinto de transferência.
- isto é parado na unidade de posicionamento do traçado (HuPo) e
levantado do cinto e fixo
- agora, o manuseamento x-y-z deslocará a cabeça de dosagem para o
local pretendido e iniciará o processo de dosagem.
- após a conclusão da dose bem sucedida, o manuseamento passa sobre
a posição de repouso e o WT é colocado no cinto
- Transporte adicional para a área de montagem KK+S\WV
(pré-requisito sem WT na posição de montagem)
A quantidade de dosagem pode ser selecionada no controlo do
dispensador (Scheugenpflug) e através do PLC dependendo da
posição
As posições podem ser vistas através do painel de controlo
St.3.2: Área de montagem KK+SW
- através do cinto de transferência, uma WT vai desde a área de
dosagem até à área de montagem KK+SW.
- esta paragem na unidade de posicionamento do traçado (HuPo),
levantada do cinto e fixada, enquanto as paredes laterais do chassis
do conjunto parcialmente montado estão alinhadas
- ao mesmo tempo, o posicionamento da bandeja KK e da bandeja SW
- uma bandeja KK (12) e uma bandeja SW (12) são colocadas manualmente
fora do recinto de proteção no respetivo cinto de alimentação
- as duas anteparas de segurança são abertas e as pilhas de bandeja
carregadas correm para a posição de aperto da respetiva empilhadora
- as duas anteparas de segurança estão novamente fechadas.
- os respetivos pegadores agarram a bandeja correspondente
- com o eixo z, a separação da bandeja e o transporte para cima
(sobre a altura real da remoção)
- para a centralização e estabilização da bandeja, é empurrado e
posicionado um suporte central sob a respetiva bandeja através da
mão x.
- com o eixo z da empilhadora, a respetiva bandeja é colocada na
almofada de centragem correspondente
- os tabuleiros estão prontos para a remoção dos componentes
- com a pega múltipla no robô Scara, o KK é agarrado na bandeja e
colocado numa posição intermédia como um auxílio de alinhamento (a
fim de obter imprecisões ao recolher da posição de aperto em falta
para montagem)
- o KK é digitalizado, agarrado novamente e instalado no WT se o
resultado do scanner estiver ok
- o n.i.O. KK está guardado numa caixa n.i.O.
- a pega múltipla no robô Scara, em seguida, agarra o SW na bandeja
e coloca-o na posição de alinhamento
- o SW é agarrado novamente e instalado no WT
- continuar com a frente de montagem da área
- se os tabuleiros fornecidos estiverem vazios, são armazenados no
cinto de rejeição correspondente
- para o efeito, as empilhadoras são posicionadas em conformidade por
eixos x
- os tabuleiros vazios só são rejeitados quando as pilhas completas
de bandejas tiverem sido processadas
- as anteparas de segurança correspondentes são abertas e as pilhas
de bandeja vazias são descarregadas para remoção manual
- as duas anteparas de segurança estão novamente fechadas.
St.3.3: Frente de montagem da área
- a frente está posicionada no WT circunferencial num ninho separado
- com a múltipla aderência no robô Scara, a frente é removida da
WT equipada com KK e SW na área de montagem KK+SW
- a frente está posicionada no ninho de uma unidade de montagem
- o WT passa por cima do cinto de transferência da área de montagem
KK+SW para a frente da área de montagem e é parado pela unidade de
posicionamento do eixo, levantado do cinto e fixo, enquanto o chassis
é mantido para baixo
- a frente posicionada é unida por um movimento de elevação
rotativo na WT
- após a conclusão do conjunto frontal bem sucedido, a unidade de
montagem desloca-se para a posição inicial e o WT


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 Alemanha
Alemanha